제품 데이터시트
ESC10645
ESCLite 6S
주요 특징
- AM32 오픈소스 펌웨어 — 시그널 와이어로 현장 업그레이드
- 45 A 연속 / 50 A 피크 (2S–5S) · 30 A 연속 / 35 A 피크 (6S) · 2S–6S LiPo 입력
- PWM, DSHOT300, DSHOT600 시그널 프로토콜 지원
- 내장 BEC: 5 V / 700 mA 안정화 출력
- 3상 브러시리스 모터 구동 · 액티브 브레이킹 지원
- Bidirectional DSHOT 또는 TELEM 시리얼(UART)을 통한 전압/전류/RPM 피드백
제품 이미지
요약 스펙
- 입력 전압 2S – 6S LiPo (7.4 – 25.2 V)
- 연속 전류 45 A (2S–5S) · 30 A (6S)
- 피크 전류 50 A (2S–5S) · 35 A (6S) · ≤ 10 s
- BEC 출력 5 V / 700 mA
- 모터 타입 3-Phase Brushless
- 펌웨어 AM32 (open-source)
- 시그널 프로토콜 PWM · DSHOT300 · DSHOT600
- 동작 온도 −20 °C ~ +70 °C
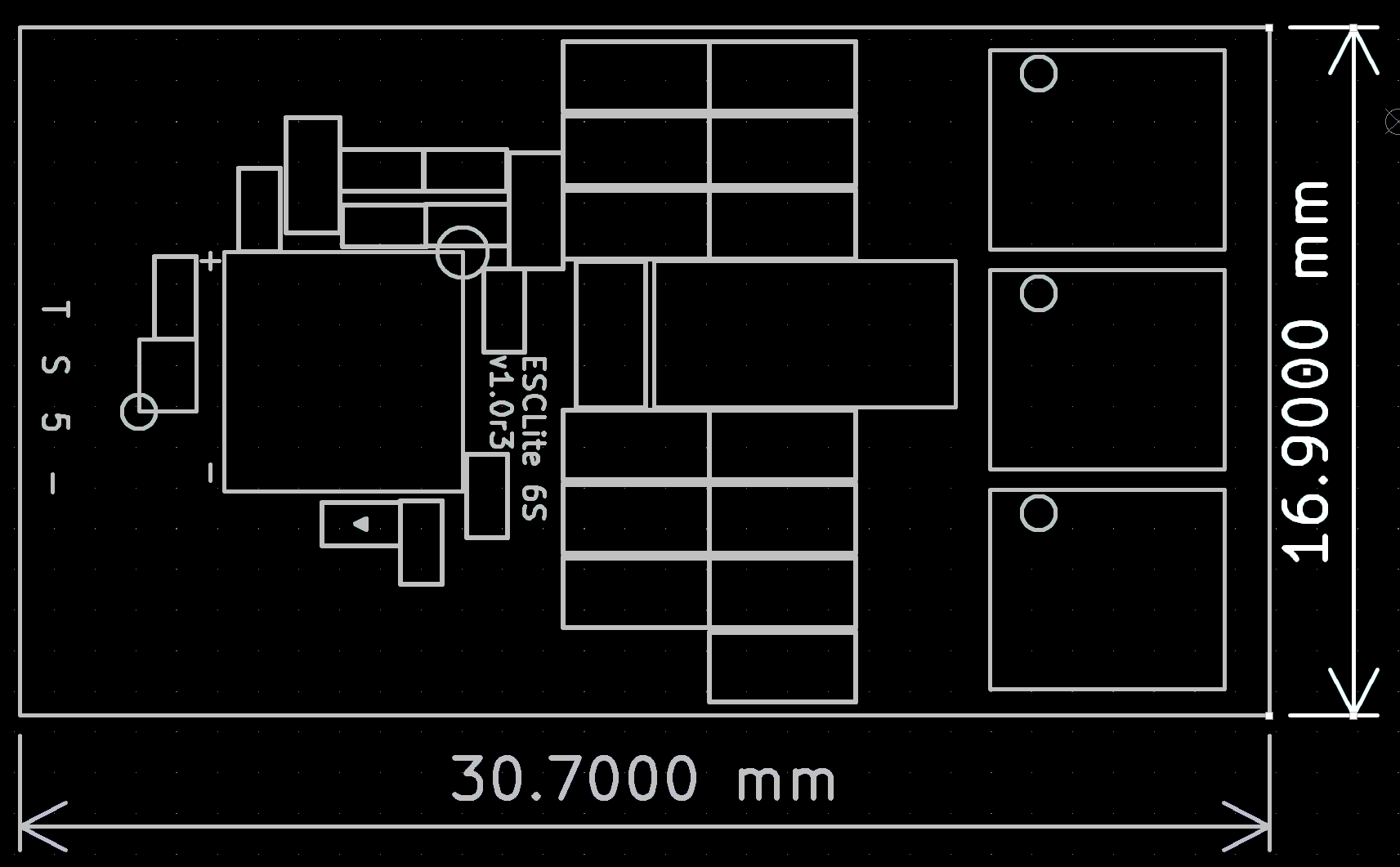
- 치수 (L×W×H) 30.7 × 16.9 × 4 mm
- 무게 ~14 g
치수
전체 사양
ESCLite 6S전체 기술 레퍼런스 · ESC10645 Rev 1.0
| 항목 | 조건 / 모드 | 값 | 단위 |
|---|---|---|---|
| 전원 입력 | |||
| 입력 전압 | Rated (2S–6S LiPo) | 7.4 – 25.2 | V DC |
| 입력 전압 | Absolute maximum | 26.0 | V DC |
| 연속 전류 | 2S–5S, steady-state | 45 | A |
| 연속 전류 | 6S, steady-state | 30 | A |
| 피크 전류 | 2S–5S, ≤ 10 s burst | 50 | A |
| 피크 전류 | 6S, ≤ 10 s burst | 35 | A |
| BEC 출력 (내장) | |||
| BEC 출력 전압 | Regulated | 5.0 ± 0.1 | V DC |
| BEC 출력 전류 | Continuous | 700 | mA |
| 모터 출력 | |||
| 모터 타입 | — | 3-Phase Brushless | — |
| PWM 주파수 | Active | 16 – 48 | kHz |
| 구동 방식 | — | Sinusoidal / Trapezoidal | — |
| 액티브 브레이킹 | — | Supported | — |
| 모터 방향 | — | Bidirectional (configurable) | — |
| 시그널 인터페이스 | |||
| 입력 프로토콜 | — | PWM · DSHOT300 · DSHOT600 | — |
| PWM 범위 | Standard | 1000 – 2000 | µs |
| DSHOT 전압 레벨 | Logic high | 3.3 / 5.0 | V |
| 텔레메트리 출력 | UART, 8N1 | 115200 | baud |
| 커넥터 | — | 2.54 mm Pin Header (GND / BEC / SIG / TELEM) | — |
| 펌웨어 | |||
| 펌웨어 | — | AM32 (open-source) | — |
| 펌웨어 업데이트 | — | Via signal wire (AM32 bootloader) | — |
| 설정 | — | AM32 Configurator (USB–UART) | — |
| 환경 및 신뢰성 | |||
| 동작 온도 | Continuous | −20 ~ +70 | °C |
| 보관 온도 | Non-condensing | −40 ~ +85 | °C |
| 습도 (동작 시) | Non-condensing | 10 ~ 90 | % RH |
| 기계 | |||
| 치수 (L × W × H) | PCB, excl. wires | 30.7 × 16.9 × 4 | mm |
| 무게 | PCB, excl. wires | ~14 | g |
사용자 매뉴얼
ESCLite 6S설정 및 구성 가이드 · ESC10645 Rev 1.0
1. 부트 톤 레퍼런스
ESC는 전원 인가와 ARM 시 모터 페이즈를 통해 짧은 멜로디를 재생합니다. 지상국 연결 없이 정상 동작 여부를 확인할 수 있습니다.
| 톤 시퀀스 | 음표 | 의미 |
|---|---|---|
| Do – Mi – Sol | C – E – G (major triad) | 셀프 테스트 통과. ESC 초기화 완료, 스로틀 신호 수신 준비. |
| Sol – La – Si | G – A – B (ascending) | 스로틀 신호 감지 및 ESC ARM 완료. 모터가 스로틀에 응답합니다. |
ⓘ 전원 인가 후 톤이 들리지 않으면 입력 전압과 시그널 배선을 확인하세요. 단일 톤 반복은 스로틀 캘리브레이션 오류 또는 신호 부재를 의미할 수 있습니다.
2. 펌웨어 개요
ESCLite 6S는 고성능 3상 브러시리스 모터를 위한 오픈소스 펌웨어 AM32를 사용합니다. PWM, DSHOT300, DSHOT600 입력 프로토콜을 지원하며, 시그널 와이어를 통해 솔더링 없이 펌웨어를 현장 업데이트할 수 있습니다. 모든 파라미터는 AM32 Configurator (Windows / Linux / macOS)로 설정합니다. ESCLite 6S는 두 개의 독립 채널을 통해 실시간 모터 피드백(전압, 전류, RPM)을 제공하며, 동시 또는 선택적으로 사용할 수 있습니다.
| 피드백 방식 | 인터페이스 | 설명 |
|---|---|---|
| Bidirectional DSHOT | SIG pin | 시그널 와이어 상에서 인라인으로 RPM 데이터를 반환. 추가 배선 불필요. FC가 Bidirectional DSHOT을 지원해야 함 (예: Betaflight RPM filter). RPM만 제공. |
| TELEM Serial | TELEM pin (UART) | 115200 baud로 모터 RPM, 공급 전압, 페이즈 전류, ESC 온도를 포함한 텔레메트리 프레임을 스트리밍. AM32 / BLHeli32 텔레메트리 파서와 호환. |
ⓘ AM32 Configurator: github.com/am32-project/AM32-configurator. 설정에는 TELEM 핀에 연결된 USB-to-UART 어댑터(3.3 V 로직) 또는 FC의 패스스루 기능이 필요합니다.
⚠ 안전 수칙: 모터가 단단히 고정되지 않은 상태에서 프로펠러를 부착한 채 스로틀을 올리지 마십시오.
⚠ 연기가 발생하면 즉시 전원을 차단하십시오.
⚠ 결함이 있거나 손상된 제품은 사용하지 마십시오.
⚠ 사용 모터에 맞춰 KV 값과 폴 수를 반드시 재설정하십시오. 공장 기본값은 1200 KV / 14 polès. KV 또는 폴 수가 잘못되면 ESC 손상 또는 모터 정격 출력 미달이 발생할 수 있습니다.
주요 설정 파라미터
ESCLite 6SAM32 Configurator · ESC10645 Rev 1.0
| 파라미터 | 기본값 | 설명 |
|---|---|---|
| Motor KV | 1200 | 모터 KV (rpm/V)에 맞춰 설정. 정류 타이밍 및 시작 동작 최적화에 사용. 멀티로터: 1000–4000 KV, 대형/고정익: 100–800 KV. |
| Motor Poles | 14 | 모터 회전자 극 수. 전기적 RPM을 기계적 RPM으로 변환할 때 사용. 22xx–28xx 시리즈는 보통 14극. |
| Input Protocol | Auto-detect | PWM, DSHOT300, DSHOT600 중 선택. Auto-detect 권장. 신호가 노이지하거나 ARM 실패 시 수동 설정. DSHOT600이 저지연에 가장 우수. |
| Motor Direction | Normal | 모터 회전 방향: Normal (전면 기준 CCW) 또는 Reversed (CW). 3상 페이즈 와이어 중 두 개를 바꿔도 변경 가능. |
| Bidirectional DSHOT | Disabled | 활성화 시 시그널 와이어로 매 DSHOT 프레임 후 RPM 반환. Betaflight / ArduPilot RPM 필터에 활용. FC의 Bidirectional DSHOT 지원 필요. DSHOT300/600만 사용. |
| TELEM Serial | Enabled | 활성화 시 TELEM 핀으로 115200 baud의 시리얼 프레임(RPM, 전압, 전류, 온도) 출력. AM32 / BLHeli32 형식. Bidirectional DSHOT과 동시 사용 가능. |
| Active Braking | Enabled | 스로틀 0에서 회생 제동 적용. 멀티로터에 권장. 프리휠링이 선호되는 고정익 / 글라이더는 비활성화. |
| Demag Compensation | Low | 고전류 정류 시 모터 탈자화 효과 감소. 저스로틀에서 코깅/스터터링이 있는 대형 고극 모터는 Medium/High로 설정. |
| Timing Advance | 15° | 정류 전기 진각. 고KV는 20–30°로 상단 출력 증가, 저KV/고극은 5–15°로 효율 개선. 5° 단위 부하 테스트. |
| PWM Frequency | 24 kHz | 모터 구동 스위칭 주파수. 32–48 kHz는 가청 노이즈 감소하나 MOSFET 손실 증가. 16–24 kHz는 고전류 효율 개선. 범위: 16–48 kHz. |
| Ramp-up Rate | 25 % | 스로틀 0에서 가속하는 속도. 낮은 값은 대형/중량 모터에 부드러운 시작, 높은 값은 레이싱/민첩 응답. |
| Startup Power | 150 % | 시작 정류 시 추가 출력. 큰 프롭 또는 고토크 부하가 저스로틀에서 안정적으로 시작되지 않을 때 증가. |
피드백 데이터 레퍼런스
ESCLite 6SBidirectional DSHOT · TELEM Serial · ESC10645 Rev 1.0
Bidirectional DSHOT — RPM 피드백
| 데이터 필드 | 범위 / 분해능 | 비고 |
|---|---|---|
| Electrical RPM | 0 – 200,000 eRPM | SIG 와이어 상 인라인 반환. 폴 페어로 나누어 기계적 RPM 산출. Betaflight RPM 필터에서 노이즈 억제에 사용. |
TELEM Serial — 풀 텔레메트리 프레임 (115200 baud, 8N1)
| 데이터 필드 | 범위 / 분해능 | 비고 |
|---|---|---|
| ESC Temperature | 0 – 255 °C · 1 LSB = 1 °C | MOSFET 정션 온도. 85 °C 초과 시 열 부하 — 부하 감소 또는 흡기 개선. |
| Supply Voltage | 0 – 655.35 V · 1 LSB = 10 mV | 입력 버스 전압 (ESC 파워 스테이지). 실 사용 범위: 7.4–25.2 V (2S–6S LiPo). |
| Motor Current | 0 – 655.35 A · 1 LSB = 10 mA | 모터 페이즈 전류. 실 사용 범위: 0–50 A. 부하 모니터링 및 스톨 감지에 유용. |
| Consumed Capacity | 0 – 65,535 mAh · 1 LSB = 1 mAh | 마지막 전원 인가 이후 배터리에서 누적 인출된 전하량. |
| Electrical RPM | 0 – 65,535 eRPM · 1 LSB = 1 eRPM | 전기적 RPM. 폴 페어로 나누어 기계적 RPM 산출 (예: 14극 모터는 ÷ 7). |
패킷 구조 — 10 바이트, 빅엔디안
| 바이트 | 필드 | 타입 | 스케일 → 단위 | 예시 |
|---|---|---|---|---|
| 0 | Temperature | uint8 | raw × 1 → °C | 0x32 = 50 °C |
| 1 – 2 | Voltage | uint16 BE | raw ÷ 100 → V | 0x08FC = 2300 → 23.00 V |
| 3 – 4 | Current | uint16 BE | raw × 10 → mA | 0x0BB8 = 3000 → 30,000 mA |
| 5 – 6 | Consumed Capacity | uint16 BE | raw × 1 → mAh | 0x01F4 = 500 mAh |
| 7 – 8 | Electrical RPM | uint16 BE | raw × 1 → eRPM | 0x4E20 = 20,000 eRPM |
| 9 | CRC-8 | uint8 | — (checksum) | 바이트 0 – 8 적용 |
ⓘ 프레임 형식은 BLHeli32 시리얼 텔레메트리와 호환됩니다. Betaflight (ESC Telemetry) 및 ArduPilot (ESC Telem)에서 네이티브 파싱 가능. CRC-8 알고리즘: 바이트별 XOR 후 MSB 셋 시 다항식 0x07로 8회 좌측 시프트.
파트 넘버 네이밍 룰
원산지
- C 중국
- K 한국
- X 미지정
샘플 단가
ESCLite 6S표준 단가 · ESC10645 Rev 1.0
| 파트 넘버 | 원산지 | 수량 | 단가 |
|---|---|---|---|
| ESC10645-X | 미지정 | 1 pcs | US$ 20 |
주문 방법
| 리드타임 (재고) | 1 – 3 영업일 |
| 리드타임 (주문) | 4 – 6 주 |
| 최소 주문 수량 | 1 pcs (기본) · 10 pcs (볼륨) |
| 결제 | PayPal · 은행 송금 · 기타 (문의) |
| 배송 | 전 세계 · DHL / FedEx / EMS |
| 연락처 | hyon646@gmail.com |
개정 이력
| 버전 | 일자 | 설명 |
|---|---|---|
| v1.0 | 2026-04-15 | 최초 배포 |