Product Datasheet
ESC10645
ESCLite 6S
Key Features
- AM32 open-source firmware — field-upgradeable via signal wire
- 45 A cont. / 50 A peak (2S–5S) · 30 A cont. / 35 A peak (6S) · 2S–6S LiPo input
- Supports PWM, DSHOT300, DSHOT600 signal protocols
- Built-in BEC: 5 V / 700 mA regulated output
- 3-phase brushless motor drive · active braking support
- Voltage / current / RPM feedback via Bidirectional DSHOT or TELEM serial (UART)
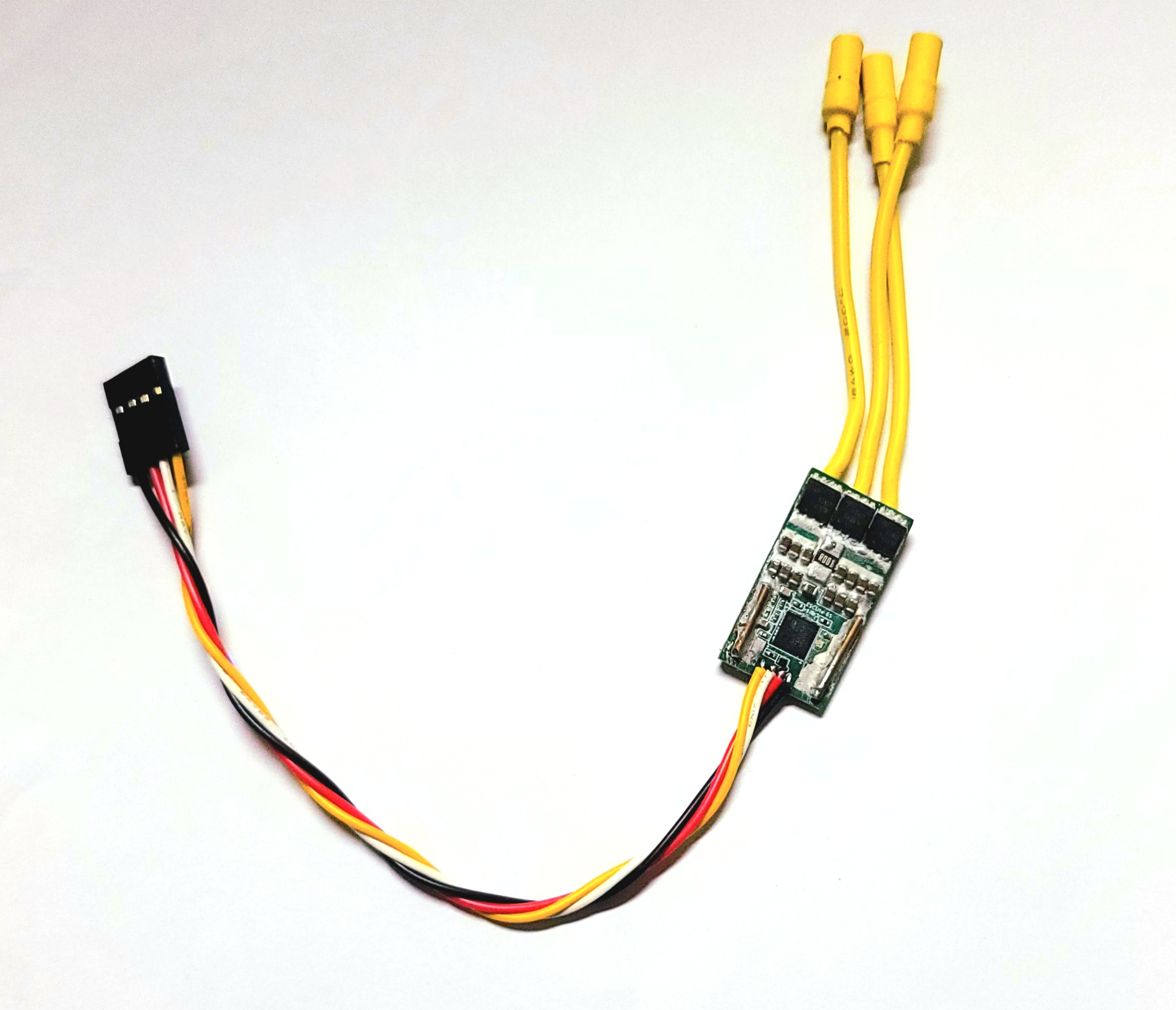
Product Image
Brief Specification
- Input Voltage 2S – 6S LiPo (7.4 – 25.2 V)
- Cont. Current 45 A (2S–5S) · 30 A (6S)
- Peak Current 50 A (2S–5S) · 35 A (6S) · ≤ 10 s
- BEC Output 5 V / 700 mA
- Motor Type 3-Phase Brushless
- Firmware AM32 (open-source)
- Signal Protocol PWM · DSHOT300 · DSHOT600
- Operating Temp. −20 °C ~ +70 °C
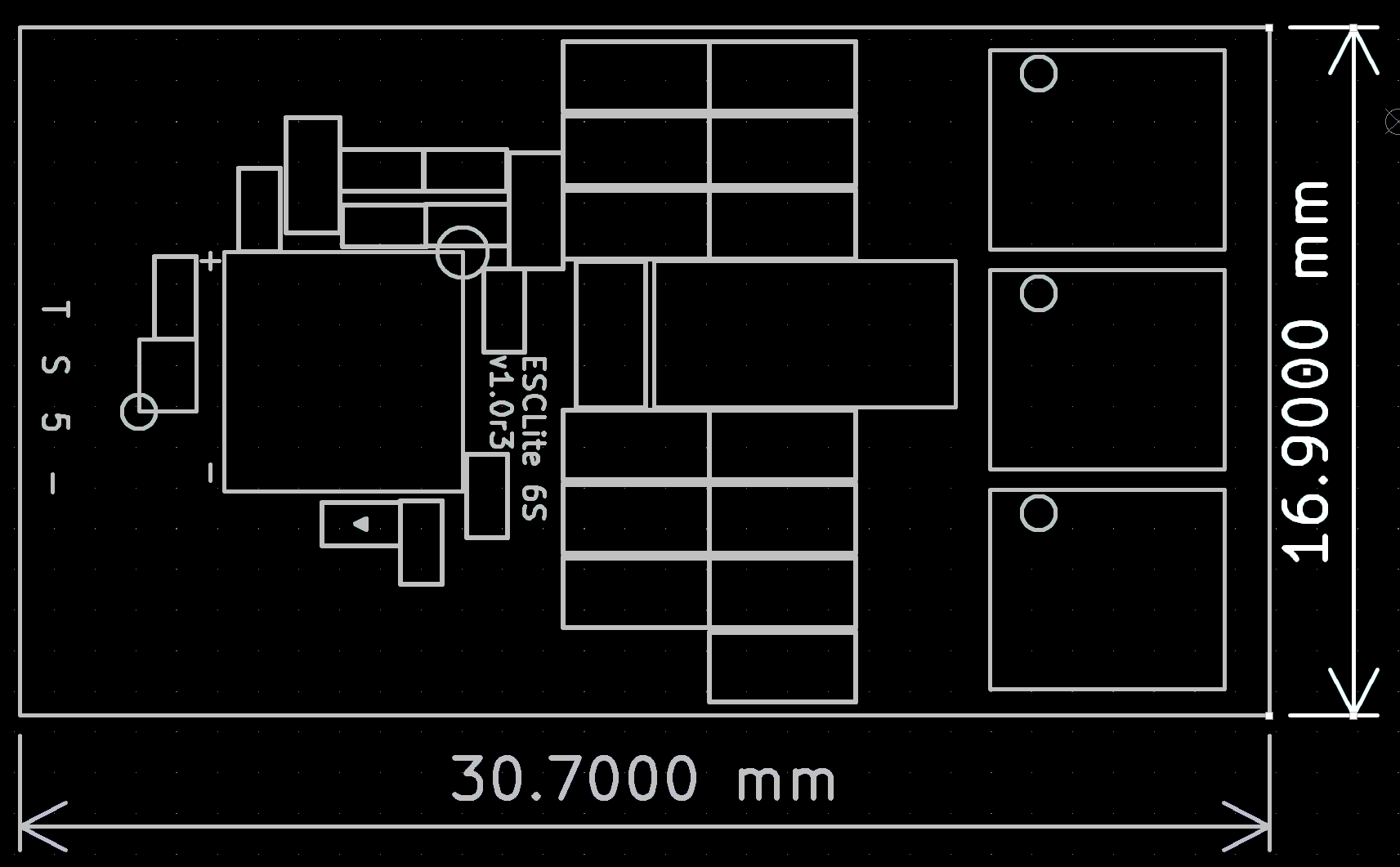
- Dimensions (L×W×H) 30.7 × 16.9 × 4 mm
- Weight ~14 g
Dimensions
Full Specification
ESCLite 6SFull Technical Reference · ESC10645 Rev 1.0
| Parameter | Condition / Mode | Value | Unit |
|---|---|---|---|
| Power Input | |||
| Input Voltage | Rated (2S–6S LiPo) | 7.4 – 25.2 | V DC |
| Input Voltage | Absolute maximum | 26.0 | V DC |
| Continuous Current | 2S–5S, steady-state | 45 | A |
| Continuous Current | 6S, steady-state | 30 | A |
| Peak Current | 2S–5S, ≤ 10 s burst | 50 | A |
| Peak Current | 6S, ≤ 10 s burst | 35 | A |
| BEC Output (Built-in) | |||
| BEC Output Voltage | Regulated | 5.0 ± 0.1 | V DC |
| BEC Output Current | Continuous | 700 | mA |
| Motor Output | |||
| Motor Type | — | 3-Phase Brushless | — |
| PWM Frequency | Active | 16 – 48 | kHz |
| Drive Scheme | — | Sinusoidal / Trapezoidal | — |
| Active Braking | — | Supported | — |
| Motor Direction | — | Bidirectional (configurable) | — |
| Signal Interface | |||
| Input Protocol | — | PWM · DSHOT300 · DSHOT600 | — |
| PWM Range | Standard | 1000 – 2000 | µs |
| DSHOT Voltage Level | Logic high | 3.3 / 5.0 | V |
| Telemetry Output | UART, 8N1 | 115200 | baud |
| Connector | — | 2.54 mm Pin Header (GND / BEC / SIG / TELEM) | — |
| Firmware | |||
| Firmware | — | AM32 (open-source) | — |
| Firmware Update | — | Via signal wire (AM32 bootloader) | — |
| Configuration | — | AM32 Configurator (USB–UART) | — |
| Environmental & Reliability | |||
| Operating Temperature | Continuous | −20 ~ +70 | °C |
| Storage Temperature | Non-condensing | −40 ~ +85 | °C |
| Humidity (Operating) | Non-condensing | 10 ~ 90 | % RH |
| Mechanical | |||
| Dimensions (L × W × H) | PCB, excl. wires | 30.7 × 16.9 × 4 | mm |
| Weight | PCB, excl. wires | ~14 | g |
User Manual
ESCLite 6SSetup & Configuration Guide · ESC10645 Rev 1.0
1. Boot Tone Reference
The ESC plays a short melody through the motor phases at power-on and at arm. Use these tones to confirm correct operation without a ground station.
| Tone Sequence | Notes | Meaning |
|---|---|---|
| Do – Mi – Sol | C – E – G (major triad) | Power-on self-test passed. ESC is initialised and ready to receive a throttle signal. |
| Sol – La – Si | G – A – B (ascending) | Throttle signal detected and ESC is armed. Motor will respond to throttle commands. |
ⓘ If no tone is heard after power-on, check power input voltage and signal wiring. A repeating single tone may indicate a throttle calibration error or missing signal.
2. Firmware Overview
The ESCLite 6S runs AM32, an open-source firmware for high-performance 3-phase brushless motors. It accepts PWM, DSHOT300, and DSHOT600 input protocols. The firmware can be updated in the field via the signal wire with no soldering required. All parameters are configured through the AM32 Configurator (Windows / Linux / macOS). The ESCLite 6S provides real-time motor feedback (voltage, current, RPM) through two independent channels that can be used simultaneously or selectively.
| Feedback Method | Interface | Description |
|---|---|---|
| Bidirectional DSHOT | SIG pin | Returns RPM data inline on the signal wire without additional wiring. Requires Bidirectional DSHOT support on the flight controller (e.g. Betaflight RPM filter). Provides RPM only. |
| TELEM Serial | TELEM pin (UART) | Streams a telemetry frame at 115200 baud containing motor RPM, supply voltage, phase current, and ESC temperature. Compatible with AM32 / BLHeli32 telemetry parsers. |
ⓘ AM32 Configurator: github.com/am32-project/AM32-configurator. A USB-to-UART adapter (3.3 V logic) connected to the TELEM pin is required, or use a flight controller passthrough feature.
⚠ Safety: Never raise the throttle with propellers attached unless the motor is securely fixed.
⚠ If smoke is detected, disconnect power immediately.
⚠ Do not use a defective or damaged product.
⚠ Always reconfigure the Motor KV value and Motor Poles to match the motor in use. Factory default: 1200 KV / 14 poles. Incorrect KV or pole count may cause ESC damage or prevent the motor from reaching rated output.
Key Configuration Parameters
ESCLite 6SAM32 Configurator · ESC10645 Rev 1.0
| Parameter | Default | Description |
|---|---|---|
| Motor KV | 1200 | Set to match motor's KV rating (rpm/V). Optimises commutation timing and startup. Typical: 1000–4000 KV multirotor, 100–800 KV larger / fixed-wing. |
| Motor Poles | 14 | Number of magnetic poles on motor rotor. Used to convert electrical RPM to mechanical RPM. Most 22xx–28xx motors use 14 poles. |
| Input Protocol | Auto-detect | Select PWM, DSHOT300, or DSHOT600. Auto-detect recommended. Set manually if signal is noisy or ESC fails to arm. DSHOT600 best for low-latency. |
| Motor Direction | Normal | Sets motor spin direction: Normal (CCW from front) or Reversed (CW). Can also be changed by swapping any two of three motor phase wires. |
| Bidirectional DSHOT | Disabled | When enabled, ESC returns RPM data on signal wire after each DSHOT frame. Enables RPM-based filtering in Betaflight / ArduPilot. Requires FC support. Use DSHOT300 or DSHOT600 only. |
| TELEM Serial | Enabled | When enabled, TELEM pin outputs serial frame at 115200 baud (RPM, voltage, current, ESC temperature) in AM32 / BLHeli32 format. Can run alongside Bidirectional DSHOT. |
| Active Braking | Enabled | Applies regenerative braking when throttle is at zero. Recommended for multirotors. Disable for fixed-wing / glider where free-wheeling is preferred. |
| Demag Compensation | Low | Reduces motor demagnetisation effects during high-current commutation. Increase to Medium or High for large, high-pole-count motors that exhibit cogging or stuttering at low throttle. |
| Timing Advance | 15° | Electrical advance angle for commutation. 20–30° increases top-end power for high-KV motors. 5–15° improves efficiency for low-KV / high-pole motors. Adjust in 5° increments and test under load. |
| PWM Frequency | 24 kHz | Motor drive switching frequency. 32–48 kHz reduces audible noise but increases MOSFET losses. 16–24 kHz more efficient for high-current. Range: 16–48 kHz. |
| Ramp-up Rate | 25 % | Controls how quickly the ESC ramps up throttle from zero. Lower values give smoother starts for heavy motors. Higher values for racing / agile applications. |
| Startup Power | 150 % | Extra power applied during startup commutation to overcome inertia. Increase for heavy props or high-torque loads that fail to spin up at low throttle. |
Feedback Data Reference
ESCLite 6SBidirectional DSHOT · TELEM Serial · ESC10645 Rev 1.0
Bidirectional DSHOT — RPM Feedback
| Data Field | Range / Resolution | Notes |
|---|---|---|
| Electrical RPM | 0 – 200,000 eRPM | Returned inline on the SIG wire. Divide by (pole pairs) to obtain mechanical RPM. Used by Betaflight RPM filter for noise suppression. |
TELEM Serial — Full Telemetry Frame (115200 baud, 8N1)
| Data Field | Range / Resolution | Notes |
|---|---|---|
| ESC Temperature | 0 – 255 °C · 1 LSB = 1 °C | MOSFET junction temperature. Above 85 °C indicates thermal stress; reduce load or improve airflow. |
| Supply Voltage | 0 – 655.35 V · 1 LSB = 10 mV | Input bus voltage measured at the ESC power stage. Practical range: 7.4–25.2 V (2S–6S LiPo). |
| Motor Current | 0 – 655.35 A · 1 LSB = 10 mA | Motor phase current. Practical range: 0–50 A. Useful for monitoring load and detecting stall. |
| Consumed Capacity | 0 – 65,535 mAh · 1 LSB = 1 mAh | Cumulative charge drawn from the battery since last power-on. |
| Electrical RPM | 0 – 65,535 eRPM · 1 LSB = 1 eRPM | Electrical RPM. Divide by pole pairs to obtain mechanical RPM (e.g. ÷ 7 for a 14-pole motor). |
Packet Structure — 10 Bytes, Big-Endian
| Byte(s) | Field | Type | Scale → Unit | Example |
|---|---|---|---|---|
| 0 | Temperature | uint8 | raw × 1 → °C | 0x32 = 50 °C |
| 1 – 2 | Voltage | uint16 BE | raw ÷ 100 → V | 0x08FC = 2300 → 23.00 V |
| 3 – 4 | Current | uint16 BE | raw × 10 → mA | 0x0BB8 = 3000 → 30,000 mA |
| 5 – 6 | Consumed Capacity | uint16 BE | raw × 1 → mAh | 0x01F4 = 500 mAh |
| 7 – 8 | Electrical RPM | uint16 BE | raw × 1 → eRPM | 0x4E20 = 20,000 eRPM |
| 9 | CRC-8 | uint8 | — (checksum) | Covers bytes 0 – 8 |
ⓘ The frame format is compatible with BLHeli32 serial telemetry. Betaflight (ESC Telemetry) and ArduPilot (ESC Telem) can parse natively. CRC-8 algorithm: XOR each byte then shift left 8 times applying polynomial 0x07 when MSB is set.
Part Number Naming Rule
Country of Origin
- C China
- K Korea
- X Unspecified
Sample Unit Pricing
ESCLite 6SStandard Unit Pricing · ESC10645 Rev 1.0
| Part Number | Country of Origin | Qty | Unit Price |
|---|---|---|---|
| ESC10645-X | Unspecified | 1 pcs | US$ 20 |
How to Order
| Lead Time (stock) | 1 – 3 business days |
| Lead Time (order) | 4 – 6 weeks |
| Minimum Order Qty | 1 pcs (standard) · 10 pcs (volume) |
| Payment | PayPal · Bank Transfer · Other (on request) |
| Shipping | Worldwide · DHL / FedEx / EMS |
| Contact | hyon646@gmail.com |
Document Revision History
| Version | Date | Description |
|---|---|---|
| v1.0 | 2026-04-15 | Initial Release |